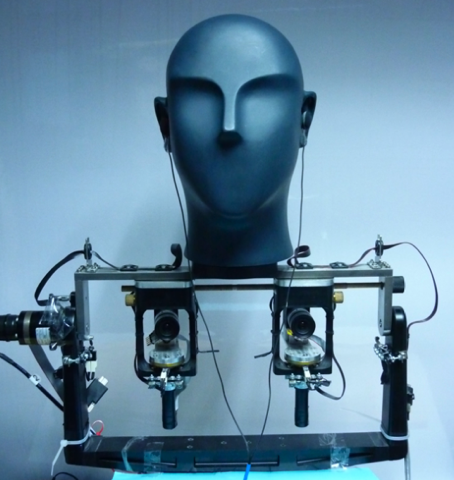
This demonstrations shows the ability to calibrate the visual and auditory sensors that are available with a robotic head. Audio-visual calibration is necessary for allowing other higher-order tasks, such as audio-visual fusion, event detection, recognition, etc. In particular we will demonstrate the calibration of a setup composed of two stereoscopic cameras and four microphones. All the sensors (cameras and microphones) will be described in a common coordinate system: six degrees of freedom for each camera (3D position and 3D orientation) and three degrees of freedom for each microphone (3D position). This scenario will be demonstrated using the POPEYE audio-visual robotic head available at INRIA and which was developed within the FP6 STREP project “Perception on Purpose” (POP).
{kind=link}

The calibration of an audio-visual robot head