The scene flow is low level computer vision algorithm for estimating depth and motion in the scene.
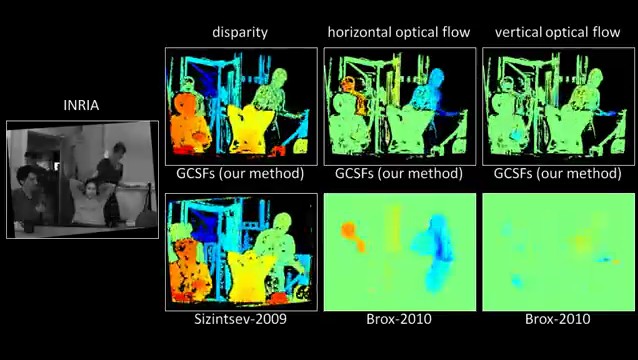
The video shows resulting disparity and optical flow maps of our GCSFs algorithm [Cech-CVPR-2011] and a comparison with spatiotemporal stereo by [Sizintsev-2009] and variational optical flow by [Brox-2010]. We are not showing results of variational scene flow by [Huguet-2007] as in the paper, since it was extremely computationally intensive.
The maps are color coded. For disparity, warmer colors are closer to the camera. In optical flow, green color is zero motion, warmer colors is left and up motion, colder colors is right and down motion respectively. Black color denotes unmatched pixels.
The video contains 3 sequences: INRIA and INRIA 2, which are from CAVA dataset of INRIA (http://perception.inrialpes.fr/CAVA_Dataset/), and ETH, which is from a padestrian dataset of ETH Zurich (http://www.vision.ee.ethz.ch/Ëœaess/dataset/).
Please, find the comments on our results and comparison with other methods in the paper [Cech-2011] in Section 3.2.
References
[Cech-2011] J.Cech, J. Sanchez-Riera, R. Horaud. Scene Flow Estimation by Growing Correspondence Seeds. In CVPR 2011.
[Sizintsev-2009] M. Sizintsev and R. P.Wildes. Spatiotemporal stereo via spatiotemporal quadratic element (stequel) matching. In CVPR, 2009.
[Brox-2010] T. Brox and J. Malik. Large displacement optical flow: descriptor matching in variational motion estimation. IEEE Trans. on PAMI, 2010. In press.
[Huguet-2007] F. Huguet and F. Devernay. A variational method for scene flow estimation from stereo sequences. In ICCV, 2007.